BANKbot climbs via two strings wrapped around corresponding axles, like spools of thread. When the motor to which the axles are attached moves one way, the axles wind the thread and cause the robot to "climb." When the motor is reversed, the robot descends.
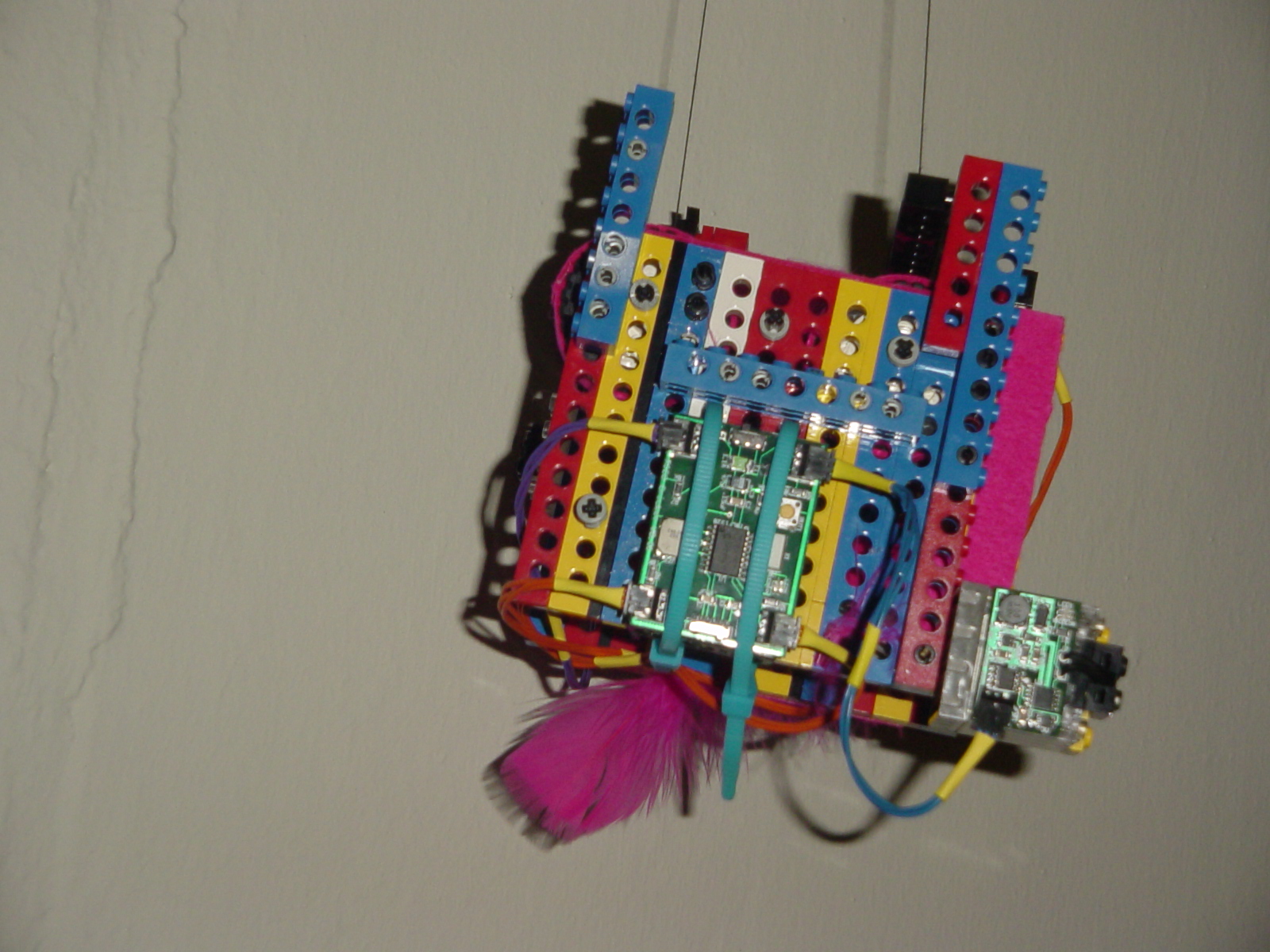
Let's take a closer look at what's going on here....
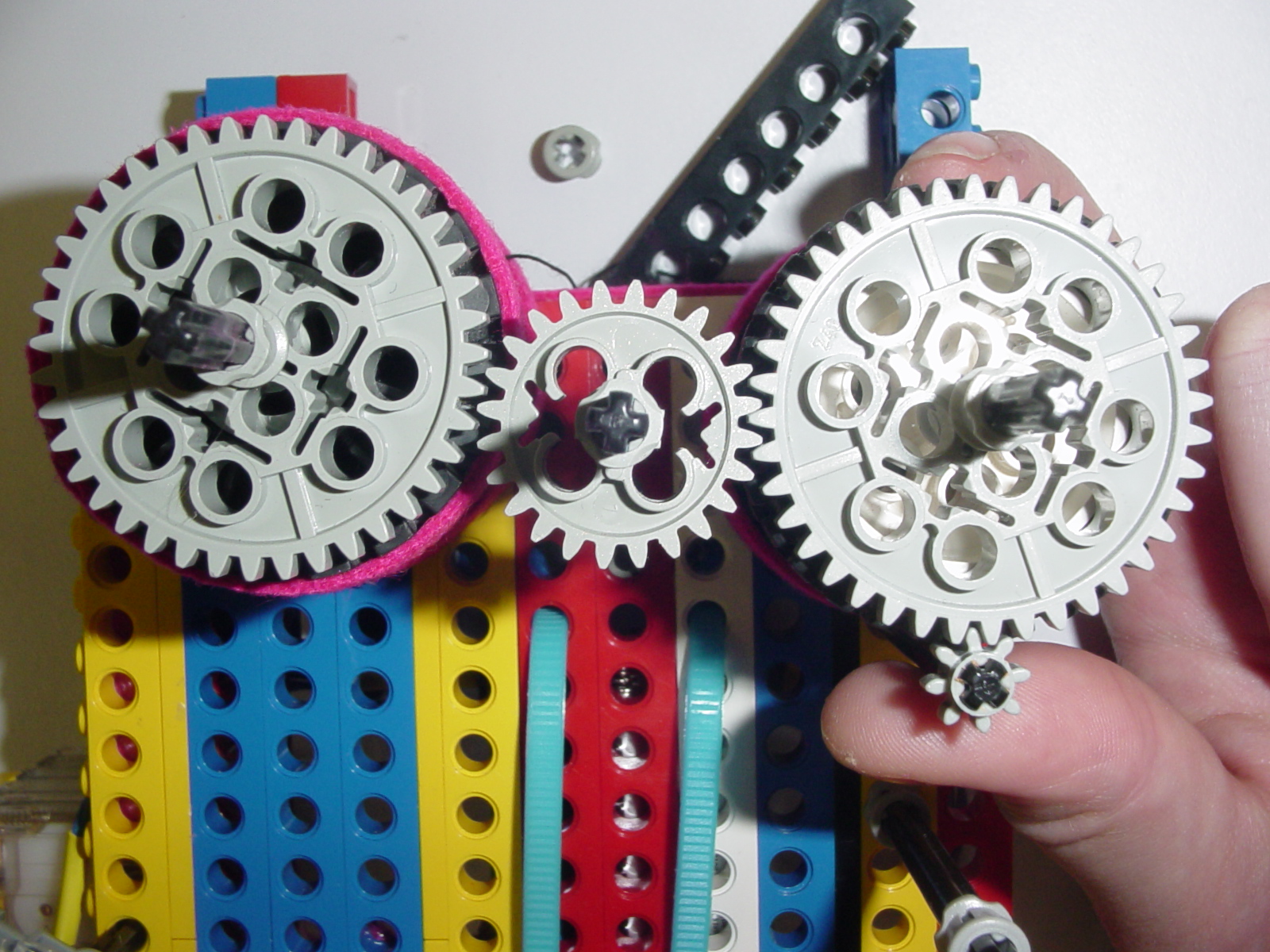
*The smallest gear (the one near my thumb) has 8 teeth, and is directly attached to a Cricket motor via a black axle. When the motor is on, the small gear causes the big 40-tooth gear on top of it to move, which in turn sets the remaining wheels in motion. Initially, I had one of the 40-tooth gears attached directly to the motor, but because the BANKbot itself was so heavy, I needed to "gear down" by adding that small gear. "Gearing down" - that is, increasing the torque while decreasing the speed, allowed me to increase the pulling force of the motor so that it would not stall under the weight of the BANKbot.
*Attached to the same axles as the two biggest gears are the strings which cause the BANKbot to climb. Therefore, when the gears turn, the thread is wound, and the robot climbs.