|
CS 332
Assignment 2 Supplement Due: Thursday, September 17 |
|
This handout provides an additional problem for Assignment 2 related to the concept of border ownership described in the article by Williford & von der Heydt.
Problem 5 (20 points): Border Ownership
In Problem 2 of Assignment 2, you explored the implementation of a region-based stereo matching algorithm, which computes a map of the stereo disparities at each location of the left image of a stereo image pair. In the resulting disparity map, a significant change in disparity signals the presence of an object boundary in the scene, which is "owned" by the surface in front. In this problem, you will implement a function that takes an input stereo disparity map and returns a matrix that encodes the side of border ownership along contours that mark significant changes in stereo disparity.
To begin, download the dispMap zip file, unzip the
file, and drag the dispMap.mat file into the stereo folder
that you downloaded earlier for Problem 2. A .mat file
can be loaded into MATLAB with the load command:
load dispMap.mat
This file contains a single variable named dispMap that is a slightly
cleaned-up version of the disparity map produced by processing the stereo images of
the scene of eclectic objects that you analyzed in Problem 2. The left image and
disparity map are shown below:
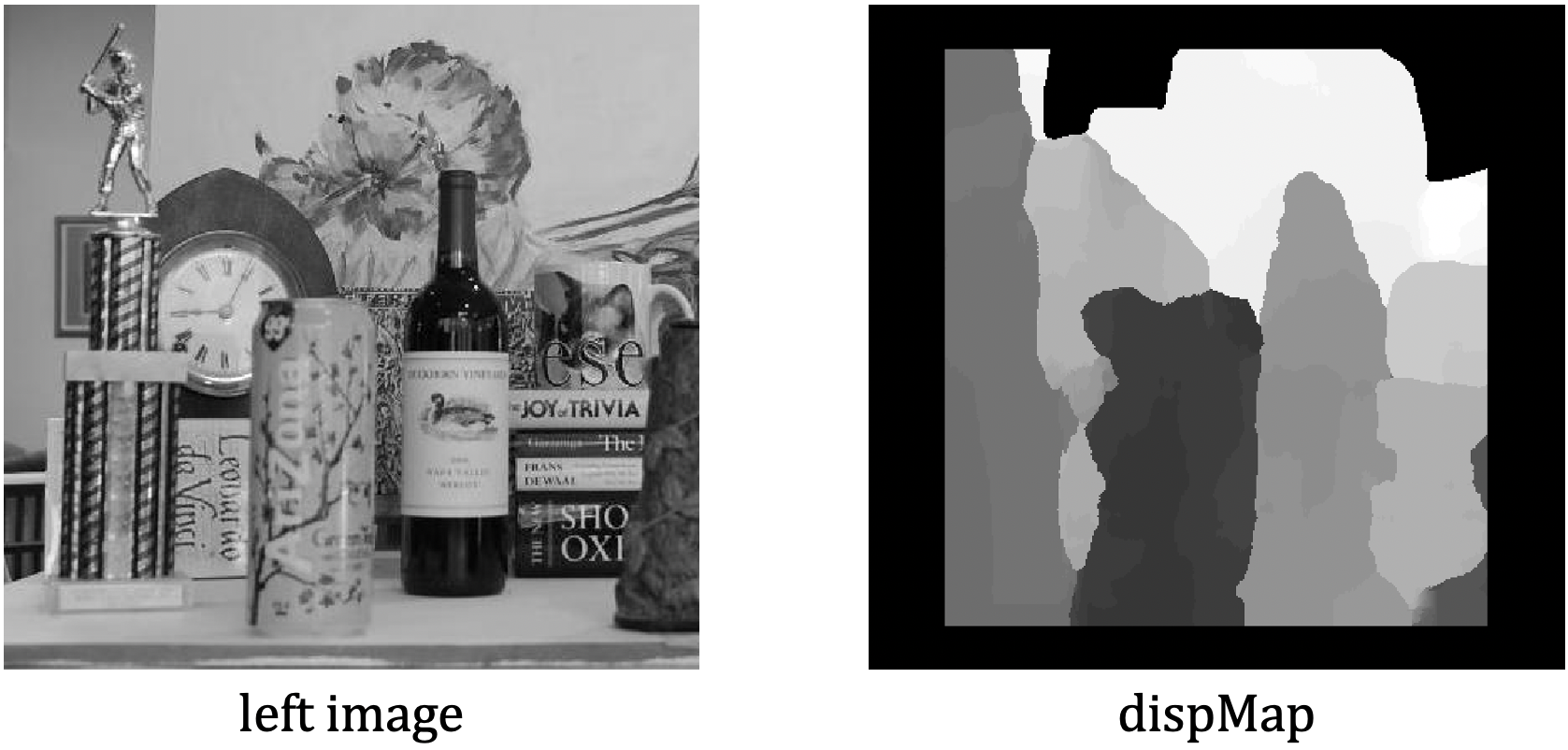
The disparity map contains disparity values that range from -16 (the front-most
surface of the Arizona can) to +17 (the back wall). In the above visualization,
the front surfaces (closest to the camera) are shown with darker grays and the
back surfaces (furthest away from the camera) are shown as white. Along the border of
the dispMap matrix, and in two areas at the top of the back wall,
there are locations where disparity values were not computed. In the case of the two
areas at the top of the back wall, no disparity values were computed because the
average contrast in the image was too low to obtain a reliable
stereo match. In locations of the dispMap matrix where no disparity
is computed, the value -25 is stored (outside the range of valid disparities),
which is displayed as black in the visualization above.
Define a function named borders with three inputs and one output:
function ownership = borders (dmap, nodisp, threshold)
dmap is the input disparity map and nodisp is the
value that is stored in the disparity map that indicates locations where no valid
disparity value was computed (-25 in this example). The input threshold
is the size of the change in disparity that will be considered a significant
change (a threshold value of 2 works well). This new function should
be placed inside your stereo folder.
For each location
of the input disparity map, the borders function should check
whether there is a significant change in disparity (above the input
threshold) from its two neighbors to the left or above, and if so,
store values in the output ownership matrix that encode the
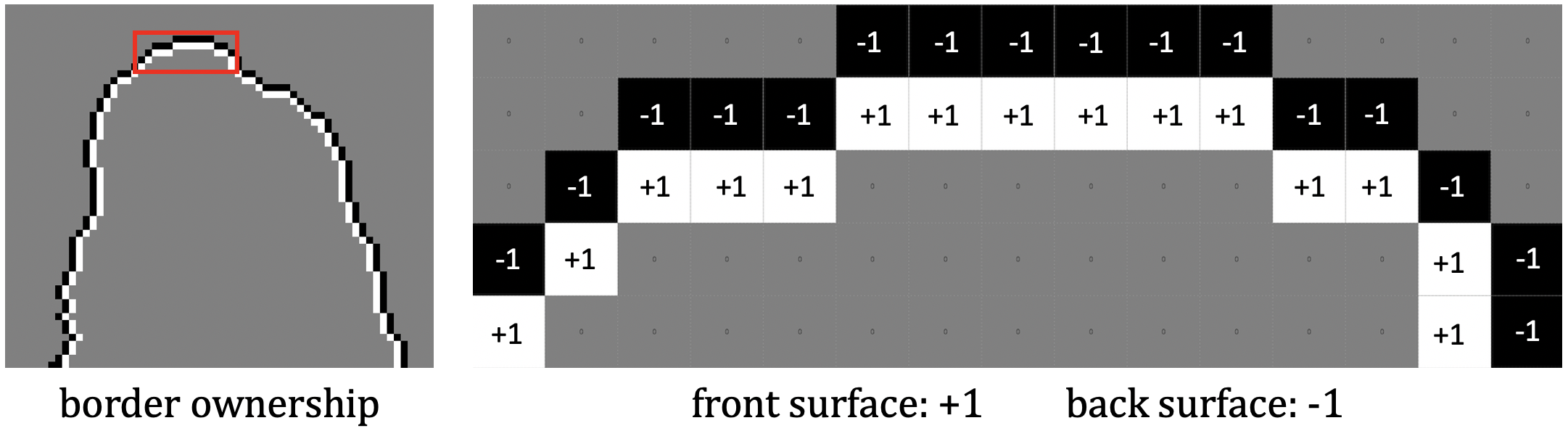
location of the front and back surfaces at this location. The front and back
surfaces can be encoded with the values +1 and -1, respectively. The
figure below on the left, displays a small region of the result around
the top of the wine bottle in the scene. The white pixels indicate locations
of the front surface (which "owns" the border), just inside the border, and
black pixels indicate
locations of the back surface, just outside the border. On the right, the
region highlighted with the red rectangle is shown enlarged, with the values
of +1 and -1 indicating the front and back surfaces around the border:
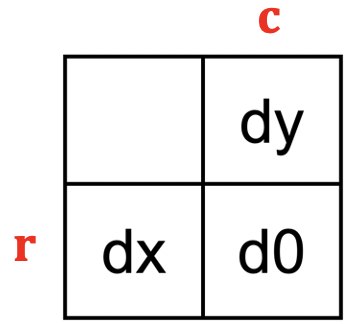
To compute the border ownership encoding, visit each location of the
input disparity map. Let r and c denote the
row and column of the location currently under consideration.
At each location, examine the disparities stored at the current location
(r,c) and
its neighbors to the left and above, labeled d0,
dx, and dy in the diagram below:
First check that none of the three disparity values are the input
nodisp value in the function header, which indicates that no
disparity was computed at the particular location. If all three
locations contain a valid disparity, then examine the pair of values
d0 and dx. If there is a significant change in disparity
(above the input threshold), then store +1 at the location
of the front surface and -1 at the location of the back surface. Then
consider the current location and its neighbor above and apply the
same logic. The top row of the figure below shows four examples of disparity values
at a location (r,c) (circled in red in the first example) and
neighboring locations
to the left and above. Below each example are the resulting values that
should be placed in the ownership matrix, which encode which
locations are on the front and back surfaces:
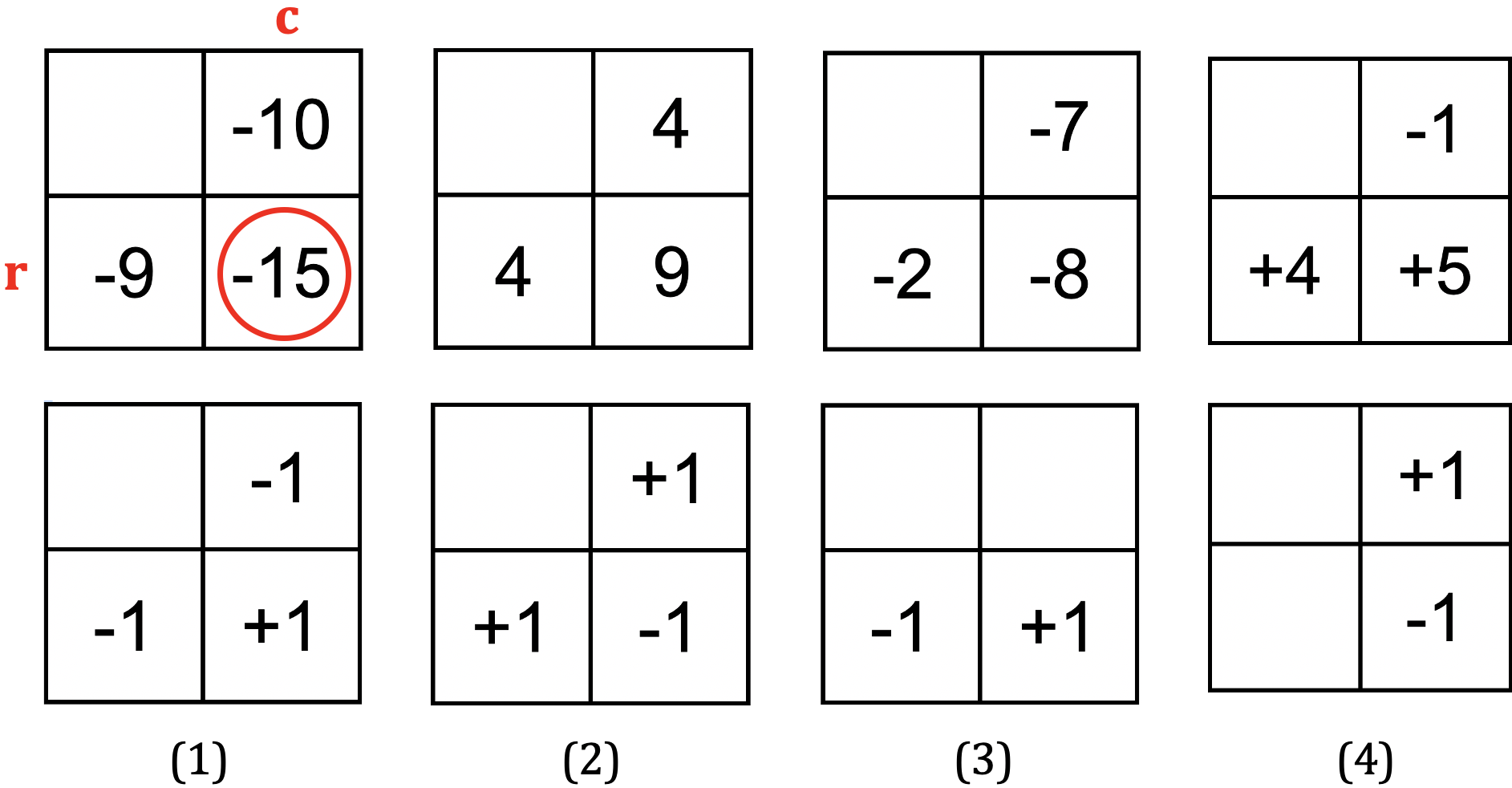
In example (1), the current location
(r,c) has a disparity that is significantly in front of
both neighbors, i.e. the difference in disparity is larger than the
input threshold (a threshold of 2 in this case) and a disparity of -15
corresponds to a surface further
in front than surfaces with a disparity of -9 or -10. In example (2),
the current location has a disparity indicating that it is
behind both neighbors. In the last two examples, the disparity at the
current location is either in front (example (3)) or behind (example
(4)) only one of its neighbors.
The following three statements load the disparity map, call the
borders function, and display the results:
load dispMap.mat
ownership = borders(dispMap, -25, 2);
imtool(ownership, [-1 1])