Code:
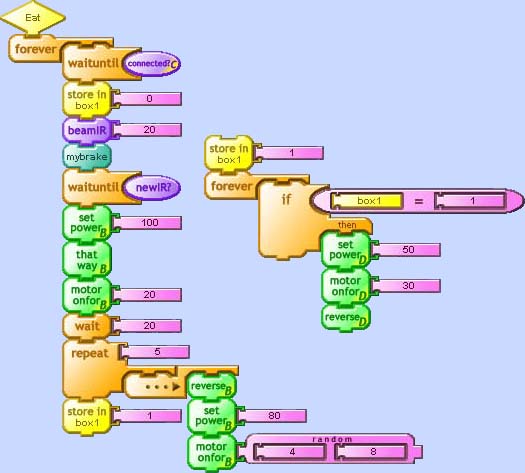
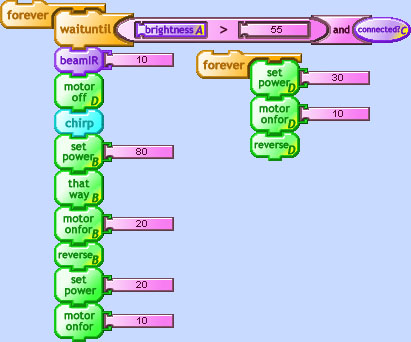
The "feet" (or
wheels, as it were,) were originally supposed to move straight until
a switch was hit, indicating that Grendel had run into a wall, at which
point it would then back up for a random amount of time, turn for a
round amount of time, and continue on.
<==
However,
it was hard to make both motors go on at once, and we eventually scrapped
the switch
idea. We eventually just had both motors on thisway for 20 seconds, then
thatway for 20 seconds.
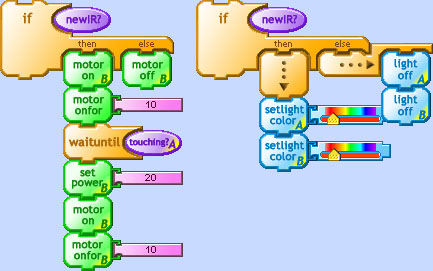
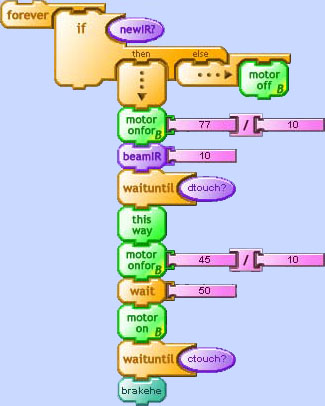
Once the head sent back an IR saying that it had opened up, the arm would swing up and hit the switch located on the arm motor. This switch, which was located on the head cricket, would tell the head to come down a bit to help "scrape" the Dane off. The arm would then start trying to go back down, and tug a bit on the Dane. As soon as the arm was (not (touching?)), the head would assume that the arm had completely left, and would begin to close. We previously had problems with timing things so that the head would always start in the same position, so we added a jaw switch; after the arm left, the head would continue to go down until the switch was hit, indicating that it was in the "start" position.
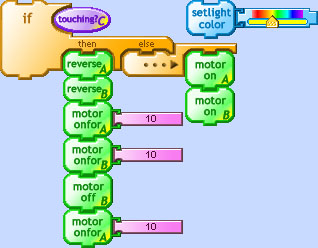
We later switched to LEDs in place of the cricket lights.