 |
Clifford
goes to Treasure Island
|
 |

Design Journal
| S | M | T | W | Th | F | S |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
|
Clifford
goes to Treasure Island
|
|
| S | M | T | W | Th | F | S |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
January 18
Ideas for final project: Treasure Island or Haunted House
Treasure Island: we would have basically a big pile of sand, and the audience could bury the “treasure” wherever they wanted. The treasure would contain a magnet, and then a robot would search around the island and look for the treasure. The robot would sense the treasure through a magnet sensor on the bottom. When the robot finds the treasure, it would dig it up somehow.
Haunted House: we considered building a haunted house the user could explore by controlling a little car or something. The car would trigger different sensors, causing skeletons to jump out of closets, “ghosts” to appear, etc. We decided not to do this idea, b/c we liked treasure island more and thought it would be more fun.
How can we "dig?"
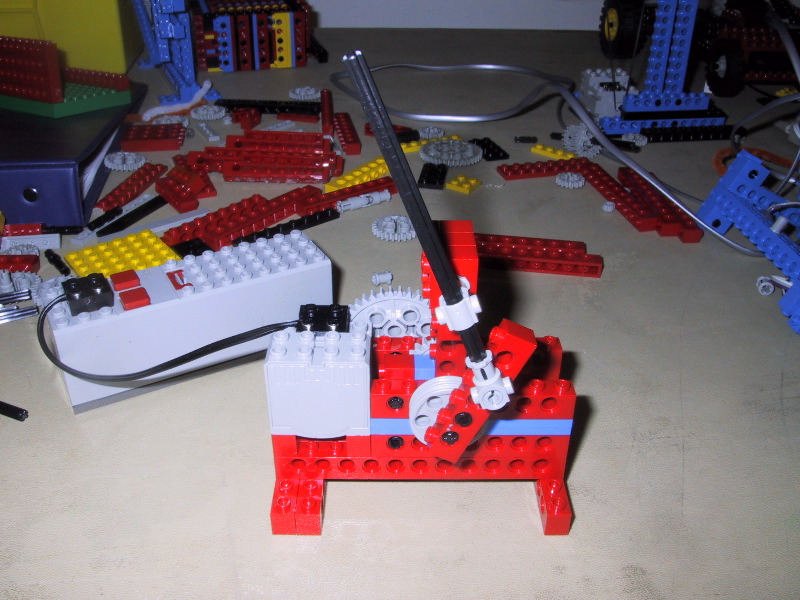
For digging: we considered the “lifter” motion module:
We altered the model so that it wasn’t “digging” in that narrow tunnel. And geared down a little bit so it went a bit slower and would have a bit more power for moving the sand. (it was previously 24-40-40, now it’s 8-40-40)
Moving up and down (for the digging): Used vertically and geared down a lot so it moves up and down slowly.
The car:
Open body cavity, digging arms in the middle, the “legs” of the car would move up and down slowly as you dig. Rear wheel drive, and the “digging” can take place in the front – the arms won’t hit the axels. For the digging arms – a brush instead of solid or plastic or whatever. Sweep the sand away.
Crafts we need: sand, something to make the treasure box, cardboard box (to hold the whole thing)
Plan 1: pile of sand, people hide the treasure, the car finds the treasure and “digs” it up. Maybe later we could add features like lifting the treasure and bringing it back to you, “escape”-like behavior (it could find it’s way around palm trees, etc.)
Second Iteration for Digging:
Our previous idea of using the lifter and the rack motion modules seemed too complicated and wasn’t working well. We looked at the motion module page again, and we noticed that piston 1 was exactly the kind of motion we wanted. So we tried that.
Piston 1:
We later reversed the piston so that it dug down as opposed to up.
The Car, again:
4 wheels – rear wheel drive, each back wheel has to be controlled by a seperate motor so that it can turn when it searches, the front wheels too, we can’t use the ball roller things like the sci-borgs b/c it won’t work in the sand. The back wheels are modeled on the design for the sci-borgs. Middle of the car has to be open w/o obstructions b/c the digger has to have room to move. For our first design iteration we wanted to gear down a lot because it will be hard to drive on the sand and the robot has to have enough time to “search.”
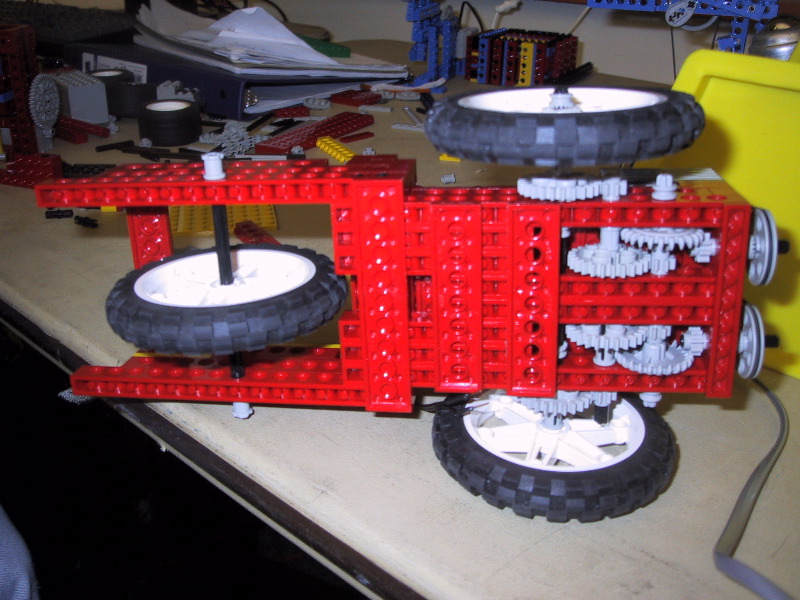
Gearing for each of the back wheels: rubber band connecting an 8 to a 24.
8 to a crown gear (24), 8 to 24, 8 to 24. Using the really big wheels. Trying
for a 1:27 gear ratio, since the wheels need a lot of power in the sand.
We decided to try one wheel in the front – we’re concerned about steering b/c it needs to be able to turn but we don’t think the kind of wheel the sci-borg uses will work in the sand.
First trial – on the carpet in the classroom. The car ran fine, we tried out the “sweep” aka dig function, we thought that the axel that would hold the broom was too long (it was digging too deep). We swapped that axel for a slightly shorter axel. The car did not turn well though. The program at this point for turn right and left was to turn one motor off and leave the other on. We decided to try having both motors on for turns, just at different powers. We might try the ball idea and see how it does on the sand. We haven’t tried it out on the sand yet b/c we don’t yet have any, but should be getting some tomorrow.
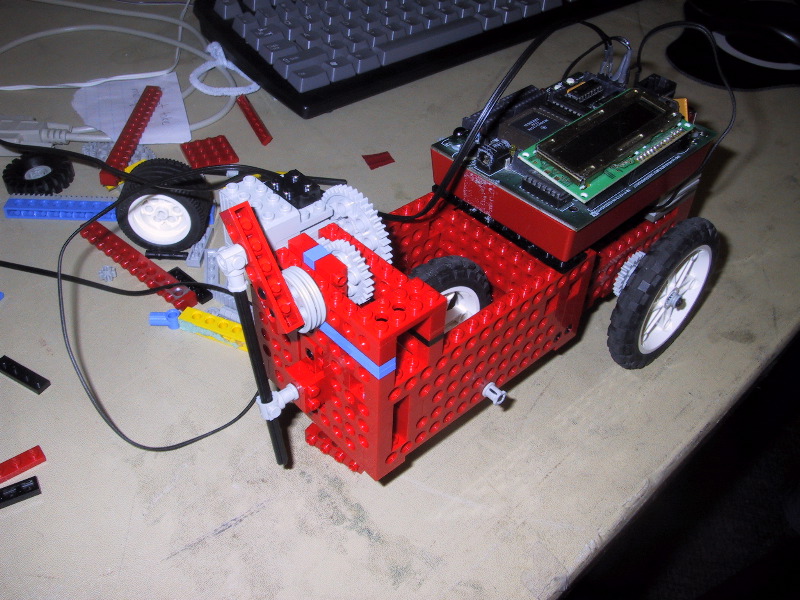
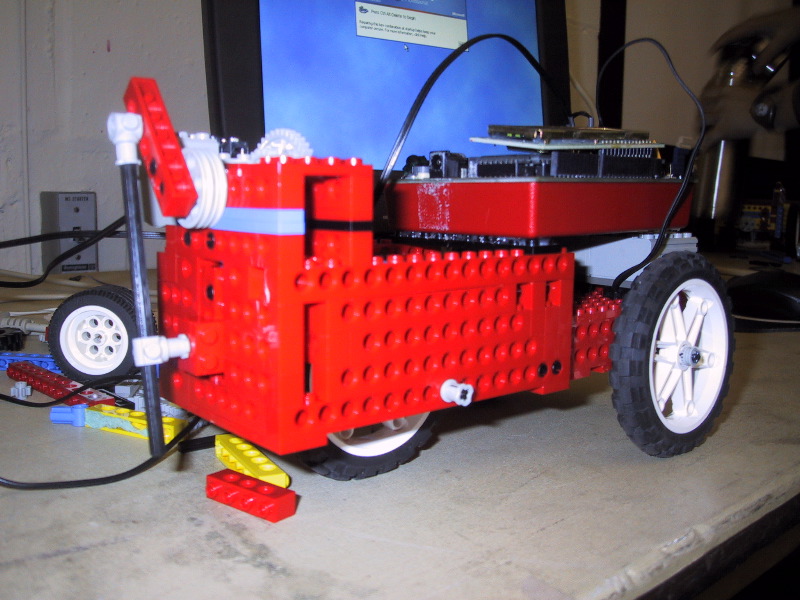
Our car at the end of class on Tuesday:
Concerns About Our Design:
We’re concerned about making our vehicle able to move on sand. Lyn suggested a couple other things, like the search taking place in water or having an easter egg hunt like project. He also suggested having more than one treasure – this would make the game move faster and it could also be turned into a contest of sorts – a bunch of people could hide their treasures and whoever’s treasure is the last to be found would be the winner.
The idea of the ship could be pretty cool - we could make it look like a pirate ship and have it searching around a pool of water- people could drop the treasures into the water to “hide” them. The easter egg idea could also be fun- we could make an out-doors type scene and have little easter eggs with magnets inside them.
One more concern we had was the size of the project. Right now our car is about a foot long (mostlyb/c we thought the big wheels might work best on the sand) this means that the area it would need to search around in would have to be equally big, which might be difficult and hindersome.
Another way to solve the problem of traveling on sand could be to use a car with treads. We can try those out on the sand tomorrow.