 |
Clifford
goes to Treasure Island
|
 |

Design Journal
| S | M | T | W | Th | F | S |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
|
Clifford
goes to Treasure Island
|
|
| S | M | T | W | Th | F | S |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
January 20
More Car Problems
We spent most of the day working on gearing again. We worked simultaneously
on two cars – one using treads and one using the big wheels. I thought
that maybe having all wheel drive might help with the turning on the car
using the big wheels. So I worked on a gear train where each motor would drive
the
two wheels on each side of the vehicle. i.e. so when you tried to turn left,
both wheels on the right side would be actively turning thisway and both wheels
on the left side would actively be turning thatway. I also wanted to create
a really sturdy gear train, so I didn’t use rubber bands or crown gears
(since these had been a weak point in our last design). However, the design
I built was weak b/c the motors weren’t secure – they kept popping
off, which meant that they weren’t turning anything. We spent a while
trying to fix that, as well as some other design flaws we found as we went
along, such as the fact that we had an odd number of gears, which meant that
the front and back wheels on each side were turning opposite ways. We fixed
this by sticking an 8 gear between two of the 24 gears that were idling. However,
this meant that our front wheels were going slower than our back wheels. So
we spent a long time trying to figure out how to fix that problem.
The car had rear wheel drive – it had trouble with turning, and a little
trouble with just going straight. The gear train was also pretty weak – things
would pop out of their correct placement/alignment if the car hit something
or was trying too hard.

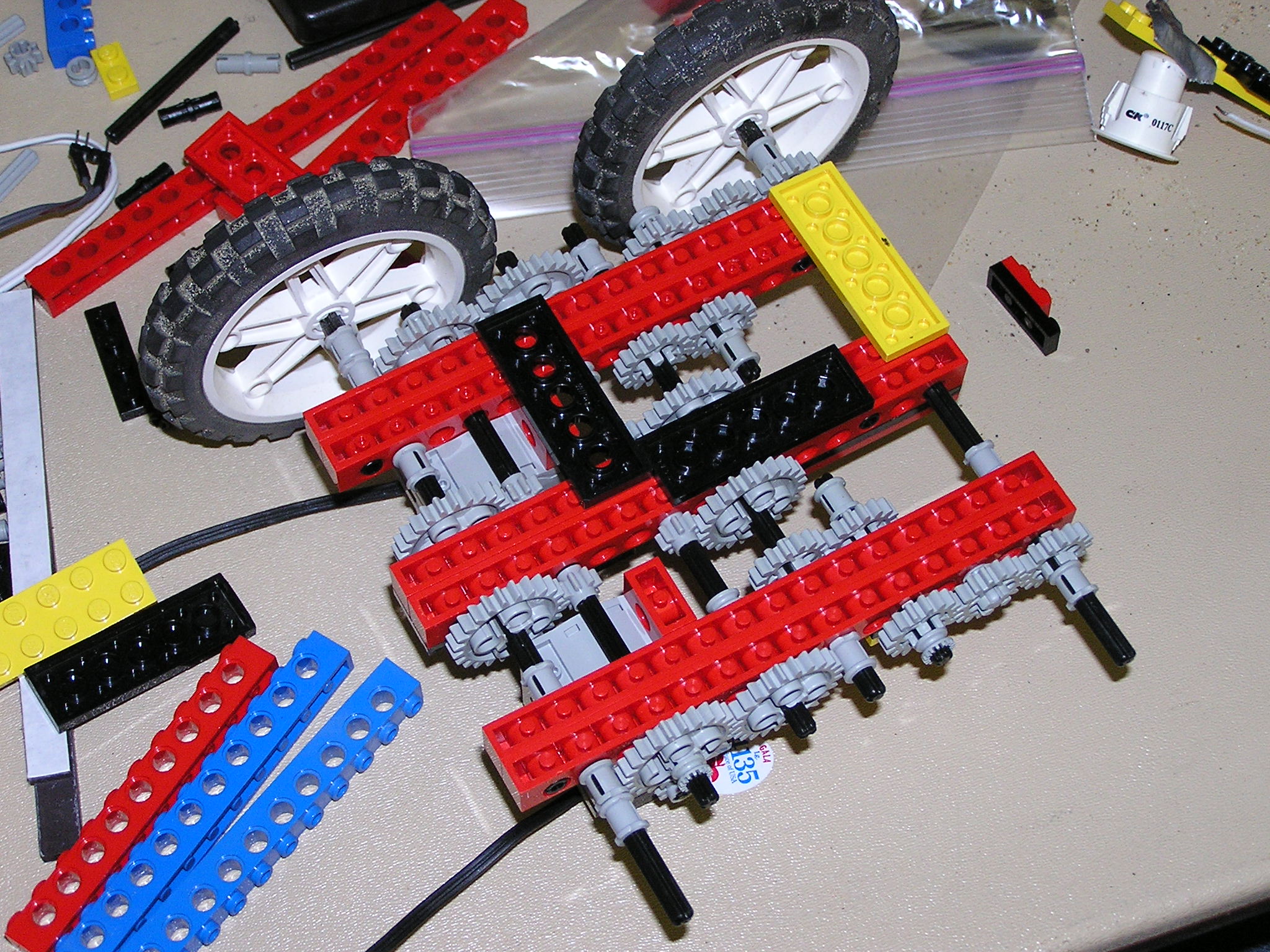
A picture of the (weak) gear train. The motors were connected to 8 tooth gears,
which turned crown gears, then we had one 8-24 gear down before the wheels.
The gearing/motors were only connected to the back wheels.

Yet another version of the car. One problem with the previous design for our
car was that the front of the body of the car was dragging along in the sand.
(especially with the treads as opposed to the large wheels) So in this design,
the front isn’t solid – the wheels are attached to beams running
vertically.
We finally found a gear train that works (two gear trains, actually). We came up with two different gear trains while working on the aforementioned problem, and decided to test them both. So we put the car back together again, and tested it. It ran fine on the carpet, and could go straight on sand. It could also turn with moderate success, even though it still kind of digs itself into a hole.
Sweeping and HandyBoards:
Since we’re sick of dealing with gearing, we decided to leave the car for now, and we’ll work on attaching the sweeping mechanism and the magnet sensor. We attached the magnet sensor to the car, and dropped a magnet on top of the sand. We wrote a program called “search” – which for now tells the car to go straight (i.e. both motors are on), and when switch 7, it should beep. It isn’t working, part of the problem is that our handyboard died. We reloaded it, and we’ll try again.
Handyboard troubles: Handylogo kept saying “HandyBoard not connected.” We checked the connection, tried turning off and on the HandyBoard, reloaded the OS on the first one, tried a different HandyBoard, tried using a different computer. We realized that we had been plugging in the sensor wrong, which was what had been killing the handyboards. We reloaded them, and the car works ok now. As of now, the car goes straight until it senses the treasure, at which point it stops and displays “Treasure!” on the HandyBoard.
We decided to change the gear train so that it was the same on both sides.
We ended up using Stephanie’s b/c it allowed more places for reinforcement.
We believe it is the more sturdy of the two. So currently our gear train looks
like: an 8 to 24. This 24 is then connected to two different gear trains – the
train turning the front wheels (24-24, 8-24, 16-16, 16-16-16) and the ones
controlling the back wheels (that 24 connects to an 8 to 24, which turns the
back wheels).
Our final gearing train (at least for now): A separate motor drives each side
of the vehicle, and no crown gears or rubber bands are used. Both the front
and back wheels of each side are connected to the motor, giving us “all-wheel” drive.
It runs and turns moderately well in the sand.
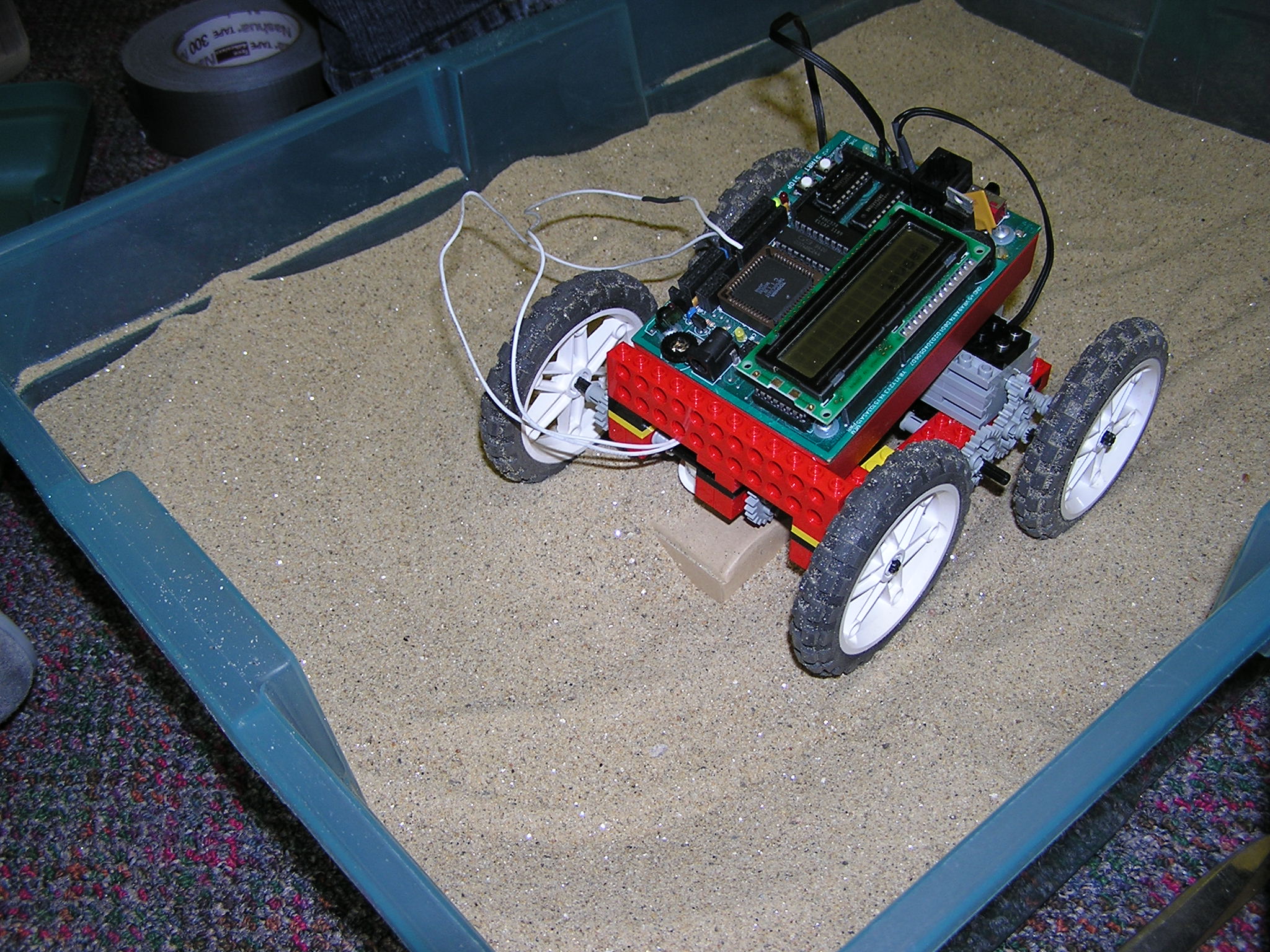
Another picture of our car at the end of the day, now with wheels and handy
board attached. It may not look like it, but this is actually an action
photo – our
little dude had just found the treasure box, stopped over it, and beeped
excitedly.