|
|
The duckys and their remotes are controlled by Blue Dot Crickets (Crickets v3.02), which is the old prototype of PicoCrickets. We chose to use these because our project required four crickets, the number would would have been a large percentage of the classroom's PicoCricket population. As it was, we had an entire Blue Dot Colony at our disposal.
The duckys and their remotes communicate by infrared (IR). Crickets can receive and send IR of a range between 0 and about 200. We chose specific IR numbers to signify the commands for each team so that the remote of one team would not interfere with the ducky of the opposing team. According to the different resistances caused by the buttons on the remote, the remote Cricket sends a specific IR number.
To correspond with the ducky's four commands (forward, left, right, backwards), and ducky Cricket is programmed to received 4 different IR numbers from it's own remote, and when one of the four specific IR numbers is detected, it will turn on the motors appropriately. A 5th "stop-signal" IR is also sent from the remote when no buttons are pressed; this tells the duck to stop all motors, which would otherwise have kept running.
|
 |
Having a total of 12 towers and a distance sensor for each, we had to use both sensor and switch ports on the HandyBoard. The former could detect a sensor value, for which we defined a threshold that would mean "the ping-pong ball is not there". For the switch ports, thankfully, the value difference between having a ping-pong right on top of the sensor and having nothing there at all was large enough that the switch ports could accurately output boolean values to indicate whether or not there was a ping-pong.
Once a "knock-off" is detected, the HandyBoard turns on the appropriate the motor port for the team that scored. The LOGOChip scoreboard, which is connected to the motor, can then know to light up another light.
On the HandyBoard's end, a variable is also kept to record the number of scores for each team so that the HandyBoard knows when the game is ended and it will sing a song to celebrate.
|
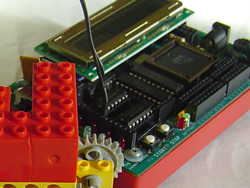 |
Each scoreboard is connected one HandyBoard motor with two wires, one for positive terminal, one for ground. The motor, to which the LOGOChip scoreboards are connected, turns on for one tenth of a second when a "knock-off" is detected and during this short time sends a current to the LOGOChip. The LOGOChip then detects a incoming current through its input port. Essentially, the LOGOChip is detecting an edge of when the connected HandyBoard motor turns on.
By a global variable that records the last light on the scoreboard that has been lighted up, the LOGOChip proceeds to light up the next light until the full score is reached (which again, is detected by means of the global variable), and then it will flash all the lights to indicate victory.
|
 |
|
 |
|
